
直方图均衡与空间滤波
直方图均衡(理论题)
Suppose that you have performed histogram equalization on a digital image. Will a second pass of histogram equalization (on the histogram-equalized image) produce exactly the same result as the first pass? Prove your answer.
进行第二次直方图均衡的结果与第一次相同。证明过程如下:
以连续灰度值为例。用变量 \(r\) 表示初始图像的灰度,并假设 \(r\) 的取值范围是 \([0, L - 1]\)。用变量 \(s\) 表示第一次直方图均衡的输出灰度值,用变量 \(k\) 表示第二次直方图均衡的输出灰度值,并令 \(p_s(s)\) 、 \(p_r(r)\) 和 \(p_k(k)\) 分别表示随机变量 \(r\)、\(s\) 和 \(k\) 的概率密度函数.
由变换函数可得:
\[s = T(r) = (L - 1) \int_{0}^{r}p_r(w) \mathop{}\!\mathrm{d} w\]于是有:
\[p_s(s) = p_r(r) \left| \frac{\mathop{}\!\mathrm{d}r}{\mathop{}\!\mathrm{d}s} \right| = p_r(r) \left| \frac{1}{(L - 1)p_r(r)} \right| = \frac{1}{L - 1}\]进行第二次直方图均衡后,
\[\begin{align*} k &= T(s) \\ &= (L - 1) \int_{0}^{s}p_s(w) \mathop{}\!\mathrm{d} w \\ &= (L - 1) \int_{0}^{s} \frac{1}{L - 1} \mathop{}\!\mathrm{d} w \\ &= s \end{align*}\]对应的概率密度函数为:
\[p_k(k) = p_s(s) \left| \frac{\mathop{}\!\mathrm{d}s}{\mathop{}\!\mathrm{d}k} \right| = p_s(s)\]由此可见,进行第二次直方图均衡的结果与第一次相同。
直方图均衡(编程题)
Write a function that applies histogram equalization on a gray image. The function prototype is “equalize_hist(input_img) → output_img”, returning a gray image whose histogram is approximately flat. You can modify the prototype if necessary.
For the report, please load your input image and use your program to:
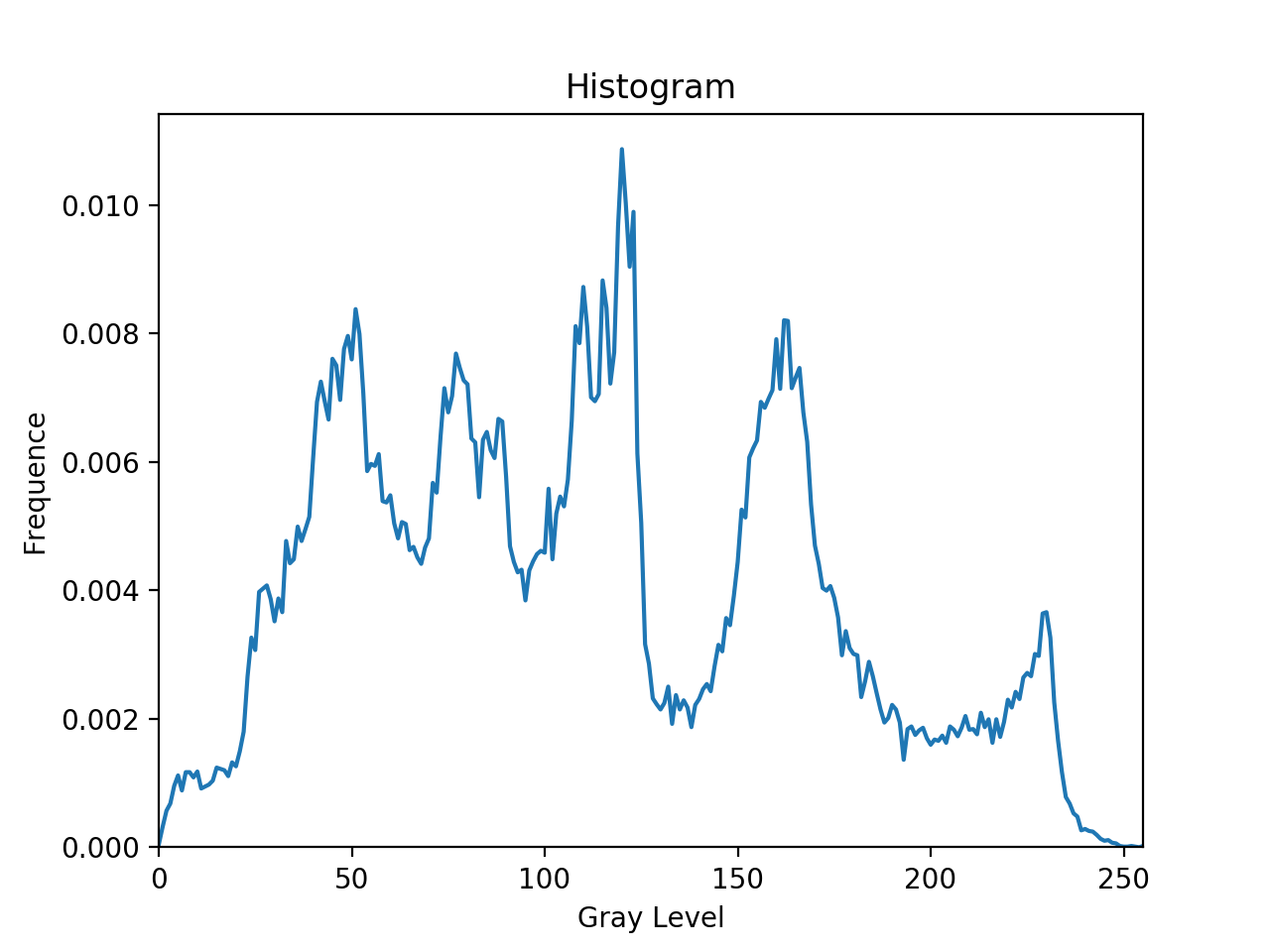
1. Compute and display its histogram. Manually paste the histogram on your report. Note: You must compute the histogram by yourself, but third-party APIs can be used for display.
原图:

制作直方图的脚本:
from PIL import Image
import matplotlib.pyplot as plt
import numpy as np
import sys
def main():
# image
filename = sys.argv[1]
im_matrix = np.array(Image.open(filename).convert('L'))
# create a histogram of the image
hist = np.zeros(256)
count = 0
for row in im_matrix:
for gray_data in row:
hist[gray_data] += 1
count += 1
hist = hist / count
# create the plot
plt.title("Histogram")
plt.plot(hist)
plt.axis([0, 255, 0, np.max(hist) * 1.05])
plt.xlabel("Gray Level")
plt.ylabel("Frequence")
plt.show()
if __name__ == "__main__":
main()
直方图:
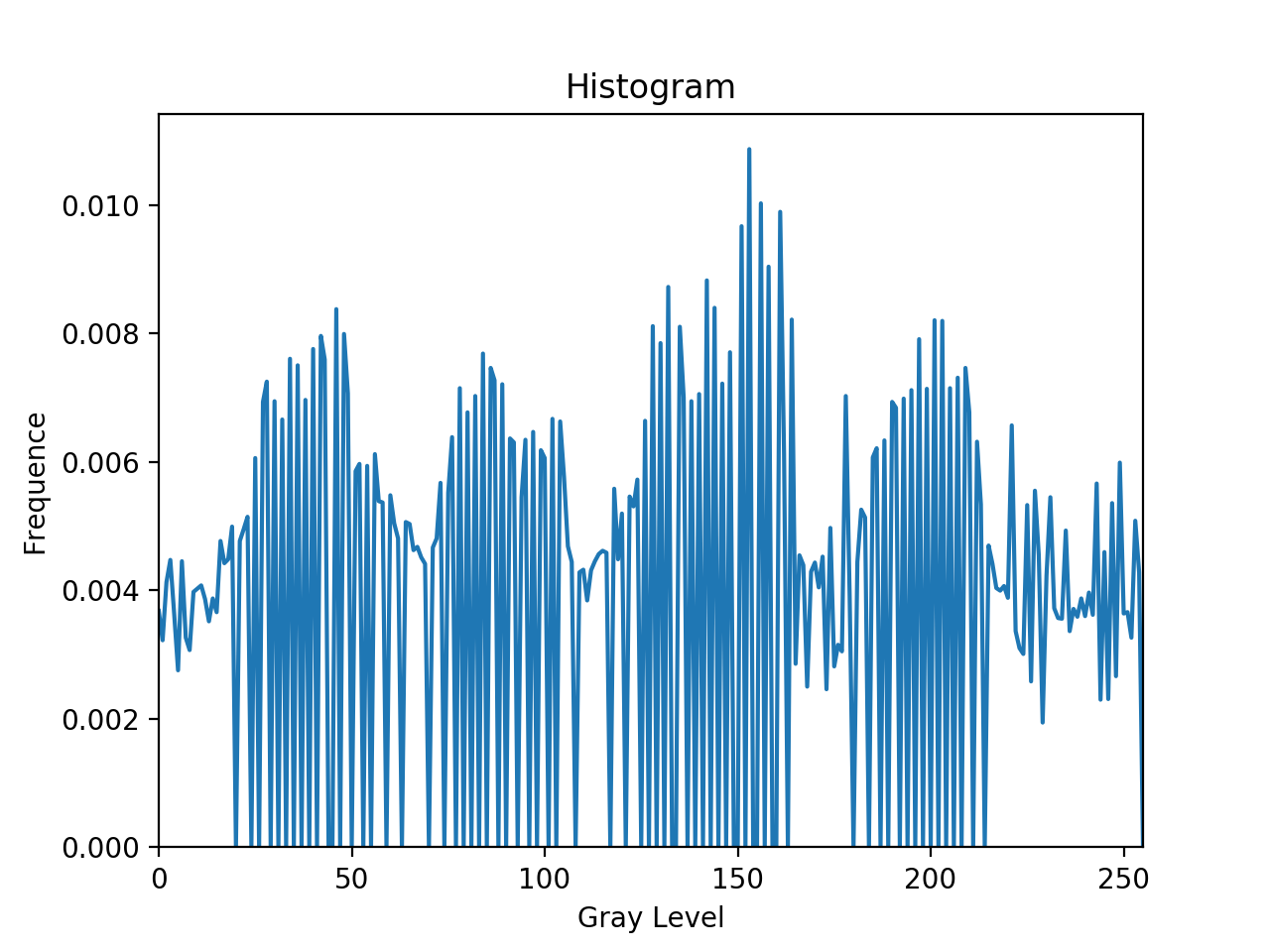
2. Equalize the histogram, and paste the histogram-equalized image and the corresponding histogram on your report.
进行一次直方图均衡后的图像:

该图像对应的直方图:
3. Equalize the histogram again, and paste the resulting histogram on your report. Does this second pass of histogram equalization produce exactly the same result as the first pass? Why?
进行第二次直方图均衡后的图像:

该图像对应的直方图:
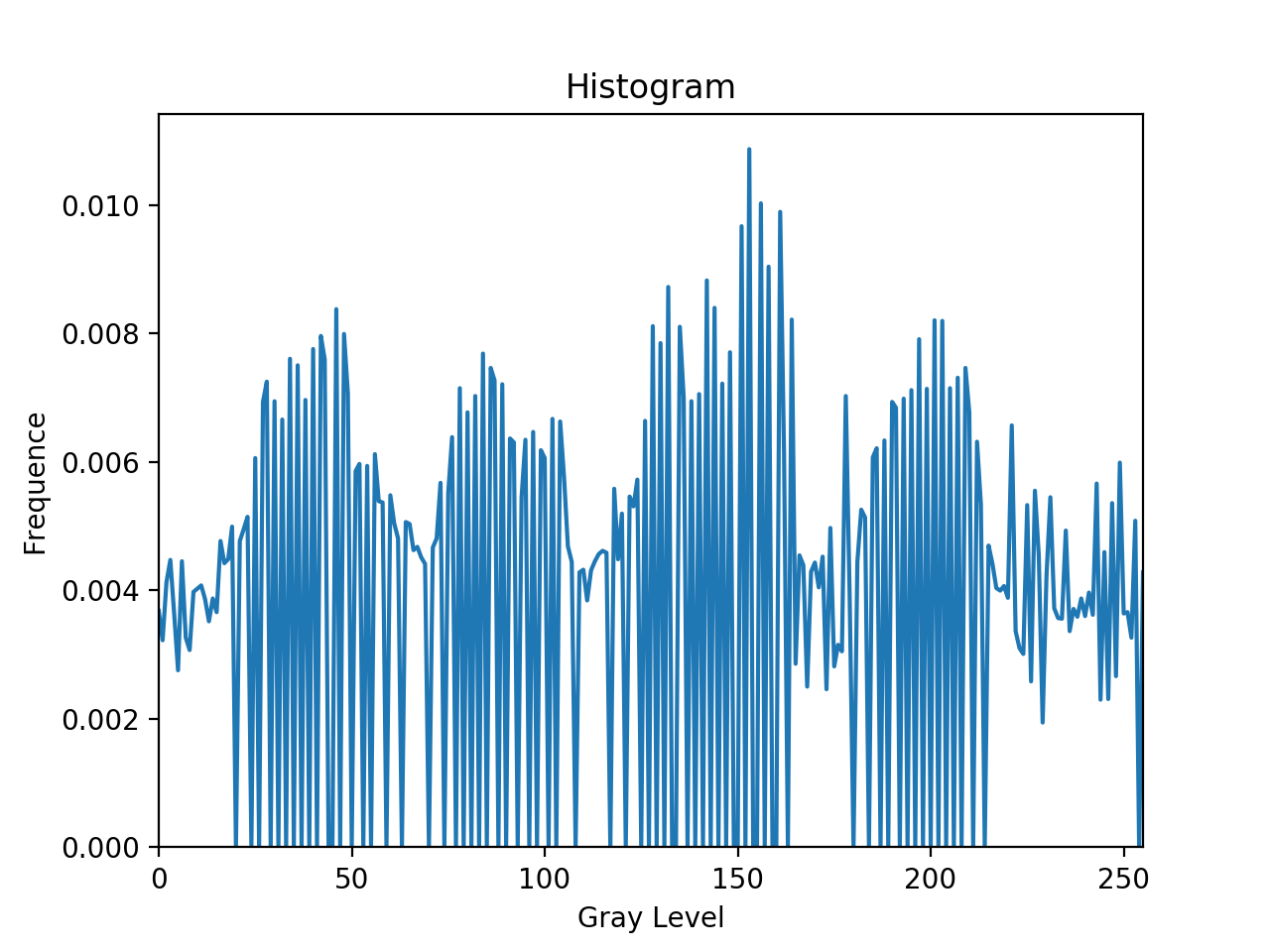
结果与第一次直方图均衡的相同,原因见第一题。
4. Please discuss how you implement the histogram equalization operation in details, i.e., the “equalize_hist” function.
算法的流程如下:
-
求出每一个灰度级别所出现的频率。
-
求出每一个灰度级别所对应的累积分布。
-
将每个灰度级别所对应的累积分布乘上 255,用于灰度的变换。
-
对于每个像素的灰度,求出该灰度级别在上一步中求得的结果,作为变换后的输出值。
代码:
from PIL import Image
import numpy as np
import os
import sys
def equalize_hist(input_img):
# image array
im_matrix = np.array(input_img)
# create a histogram of the image
hist = np.zeros(256)
count = 0
for row in im_matrix:
for gray_data in row:
hist[gray_data] += 1
count += 1
hist = hist / count
# accumulative frequency
acc_freq = np.zeros(256)
acc_freq[0] = hist[0]
for i in range(1, 256):
acc_freq[i] = acc_freq[i - 1] + hist[i]
# transformation array
trans = (acc_freq * 255).astype(int)
# histogram equalization
for i, row in enumerate(im_matrix):
for j, gray_data in enumerate(row):
im_matrix[i][j] = trans[gray_data]
return Image.fromarray(im_matrix).convert("L")
def main():
# image
input_file = sys.argv[1]
input_img = Image.open(input_file).convert('L')
# histogram equalization
output_img = equalize_hist(input_img)
# save output image
f, e = os.path.splitext(input_file)
output_file = f + "_eh" + e
output_img.save(output_file)
if __name__ == "__main__":
main()
空间滤波(编程题)
Write a function that performs spatial filtering on a gray image. The function prototype is “filter2d(input_img, filter) → output_img”, where “filter” is the given filter. You can modify the prototype if necessary.
1. Smooth your input image with 3 × 3, 5 × 5 and 7 × 7 averaging filters respectively. Paste your three results on the report.
3 × 3 均值滤波器:

5 × 5 均值滤波器:

7 × 7 均值滤波器:

2. Sharpen your input image with a 3 × 3 Laplacian filter and then paste the result. In addition, briefly discuss why Laplacian filter can be used for sharpening.
拉普拉斯滤波器:
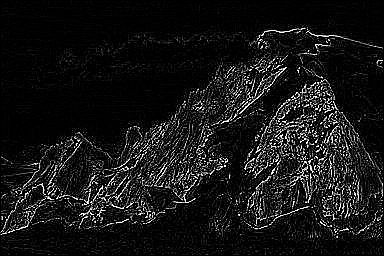
拉普拉斯算子是一种微分算子,能够反映图像中灰度的突变。因此,图像微分增强边缘和其他突变,而削弱灰度变化缓慢的区域。
3. Perform high-boost filtering on your input image. Choose a k as you see fit. Write down the selected k and paste your result on the report.
选用 3 × 3 均值滤波器,并设置 k = 3,结果如下:

4. Detailedly discuss how you implement the spatial filtering operation.
-
Step 1: 根据滤波器的大小填充相应的数值为 0 的行与列。
-
Step 2: 将滤波器旋转 180°,然后用滑动窗口的方法进行乘法求和,得出全部卷积结果。
-
Step 3: 对卷积的结果进行裁剪,恢复为原来的图形大小。
代码:
from PIL import Image
import numpy as np
import os
import sys
def filter2d(input_img, filter):
# image array
im_matrix = np.array(input_img)
row, col = im_matrix.shape
# zero padding
filter_size = filter.shape[0]
padding_size = filter_size // 2
padding_im_matrix = zero_padding(im_matrix, padding_size)
# convolution
reverse_filter = np.flip(filter)
convol_matrix = np.zeros((row + 2 * padding_size, col + 2 * padding_size))
for i in range(padding_size, padding_size + row):
for j in range(padding_size, padding_size + col):
submatrix = padding_im_matrix[i - padding_size : i + padding_size + 1,
j - padding_size : j + padding_size + 1]
convol_matrix[i][j] = round((submatrix * reverse_filter).sum())
# output
output_im_matrix = convol_matrix[padding_size : padding_size + row,
padding_size : padding_size + col]
return Image.fromarray(output_im_matrix).convert("L")
def zero_padding(matrix, padding_size):
row, col = matrix.shape
new_matrix = np.zeros((row + 2 * padding_size, col + 2 * padding_size))
new_matrix[padding_size : padding_size + row, padding_size : padding_size + col] = matrix
return new_matrix
def high_boost_filtering(input_img, filter, k):
im_matrix = np.array(input_img)
blurred_im_matrix = np.array(filter2d(input_img, filter))
mask_matrix = im_matrix - blurred_im_matrix
return Image.fromarray(im_matrix + k * mask_matrix).convert("L")
def main():
# image
input_file = sys.argv[1]
input_img = Image.open(input_file).convert('L')
# filters
# filter_3_3 = np.ones((3, 3)) / 9
# filter_5_5 = np.ones((5, 5)) / 25
# filter_7_7 = np.ones((7, 7)) / 49
filter_laplacian = np.array([[1, 1, 1],
[1, -8, 1],
[1, 1, 1]])
# spatial-filtering
output_img = filter2d(input_img, filter_laplacian)
# save output image
f, e = os.path.splitext(input_file)
output_file = f + "_sf" + e
output_img.save(output_file)
if __name__ == "__main__":
main()